

Specification sheets are complicated. Let's clear up any confusion by going through nine common terms every laser scanning professional should know.
If you’re looking for a mobile mapping system, you’ve probably spent more than an hour or two perusing data sheets. In the process, you probably came across one or two confusing specifications. “What the heck is a laser class?” you might ask yourself. “…And why should I care?”
Today, our goal is to clear up the mystery about lidar specifications by walking you through some terms from the NavVis VLX spec sheet. We’ll explain the more obscure specs, what they mean, and why they matter (or don’t matter) to the work you do.
Before we get started, just note that other manufacturers might use slightly different terminology than NavVis does. But the ideas you’ll learn here should help you navigate their data sheets too.
Let’s dig in.
Layers
(Sometimes called: channels). The number of lasers the scanner uses to capture a point cloud. NavVis VLX uses two lidar sensors, each one with 16 layers, for a total of 32 layers.
Why does it matter?
The more lasers a scanner uses, the faster it can capture a scene. And the faster you can move it while still achieving high resolution.
Units designed for faster-paced applications, like mapping from the top of a moving car, use lidar sensors with more layers. That enables them to capture more points in a given period and ensure high enough resolution for the intended use. Scanners used for slower-paced applications, like indoor mapping, can achieve the same resolution with (relatively) fewer layers.
Points per second
The number of measurements the scanner can capture in a second.
Why does it matter?
More points per second indicate that the scanner will capture denser point clouds all else being equal. But remember that a higher number of points per second is not always better. Once you have enough points in the cloud for your intended application, capturing more points makes your point cloud bigger and heavier to process.
Laser class
Indicates how hazardous the beam is to the human eye or skin. Lasers can be one of four classes per a US Food and Drug Administration (FDA) guidance document.
Why does it matter?
The class offers assurance that the scanner is safe to use.
Virtually all lidar scanners use class 1 lasers, which is the safest class. That means the scanner is completely harmless, to the point where you (or a passerby) can look directly at it without any eye protection and experience no negative effects.
At class 2, the laser starts to irritate the eye. By class 3, looking at the laser without eye protection for an extended period can cause damage. Class 4 lasers can cause a fire, or burn your eyes, or your skin. Think science fiction laser beam.
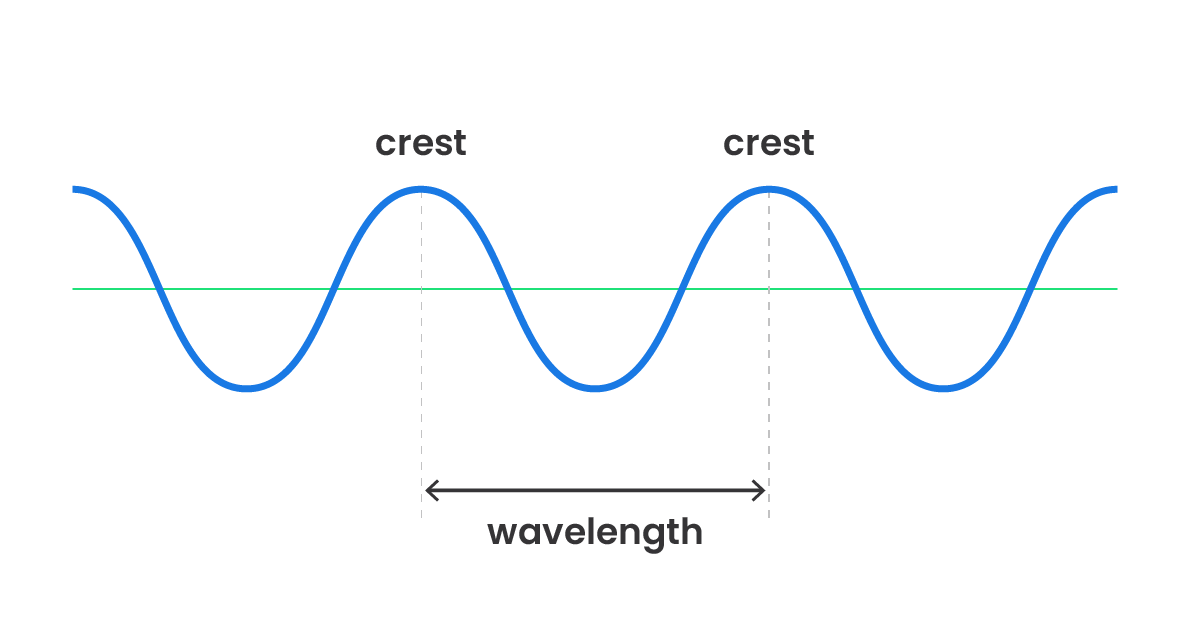
Laser wavelength
The distance between successive crests of a wave in the beam of light (see image). Visible light has a wavelength of between 400-700 nanometers (nm) and the wavelength determines the color you see.
Lidar sensors will tend to use either ~905 nm or ~1550 nm, both of which are invisible to the human eye, safe to use according to the FDA, and capable of traveling hundreds of meters.
Why does it matter?
Velodyne has a great blog post that explains the importance of wavelengths in plain terms. But it’s also a deeper dive than you might need, so here’s the gist.
The choice of wavelength has a big effect on the performance of the laser. A ~1550 nm laser is more likely to be absorbed by water in the environment, like fog, rain, or even humidity in the air. To counteract this problem, the laser would need to use more power — meaning shorter battery life. A 905 nm laser won’t lose performance in these conditions and is much simpler to manufacture.
Range
The maximum (and sometimes minimum) distance that the laser can detect an object.
Why does this matter?
On the surface, it’s simple: Range indicates the distance your scanner can be from an object and still return usable results.
But don’t assume that this number indicates the distance that a laser scanner can capture and still hit the accuracy levels indicated on the spec sheet. Rigorous testing (and field experience) will show that a laser scanner’s accuracy decreases as it moves farther away from the object. (On top of that, there are a huge number of other factors that can affect the accuracy of a lidar sensor, even at a constant range. That’s true especially when you’re talking about mobile mapping, which adds software to the equation.)
Even though the range is a useful spec, you shouldn’t rely on it as an absolute measure of how far you can capture for your particular application. To be precise about that, you’d need to perform a series of rigorous field tests with the scanner, working at different ranges, and in different environments. That would show you how far a scanner can capture on your job sites and still return data that hits the quality specs you need.
The good news is that NavVis has already performed these kinds of tests for NavVis VLX. To see the accuracy this device can achieve at different ranges, and in different environments, see the NavVis VLX Accuracy White Paper.
IP Classification
There’s some debate — some people say it stands for ingress protection, others say international protection rating. Either way, it classifies the level of protection that an electronic device includes to prevent the ingress of dust or liquids that may cause harm to the internal circuitry.
Why does this matter?
Getting electronic devices wet can cause big problems (as you know if you’ve ever dropped your phone in a pool of water). Picking a scanner with the right IP rating can prevent you from experiencing this heartache with your investment since the number offers reliable guidance about the environments it can handle safely.
A ruggedized scanner built for work in tough environments — like an active construction site or a wet outdoor site — will often have an IP rating of 54. That means it has some protection against dust ingress, and that it is protected from water jets from any direction. Scanners with this rating tend to be more expensive, and limited to terrestrial use.
NavVis VLX boasts an IP rating of 42, which means it's protected against solid objects over 1 mm and can withstand splashes of water from any direction.

Accuracy
Before we get to the terms, a quick note: Accuracy specs for a mobile scanner offer a little more nuance than you would see with a terrestrial scanner. That’s because a terrestrial scanner captures points from a fixed location in space, and a mobile scanner captures points while you move — which means it requires significant processing from a SLAM algorithm to place the points correctly in space.
If the idea of SLAM is new to you, check out our comprehensive guide here.
Relative accuracy
The accuracy of a point cloud on a local scale. For a mobile scanner, this is the accuracy of measurement between points in a single location like a room.
Why does it matter?
The metric is important in determining the reliability of a scanner because it can show how accurate the dimensions of a room are — an important consideration for applications like scan-to-BIM or generating floor plans.
Absolute accuracy
The accuracy of the point cloud on a global scale. For a mobile scanner, this is the accuracy of measurement between two points that were not captured by the scanner in a single location. For example, the distance between opposite corners of a building.
Why does it matter?
Global accuracy is crucial when determining the reliability of a mobile scanner because it highlights the amount of drift error that accumulates due to SLAM in large or complex mapping projects. In other words, it indicates the scanner’s accuracy across the whole project.
It is also known as absolute accuracy, since it indicates the accuracy of the point cloud measurements as compared to their "true" position in an absolute coordinate system determined by a higher order method, like survey, i.e., total station measurements.
For more precise definitions for these terms, and more details about how NavVis measured this metric for its scanners, see the NavVis VLX Accuracy White Paper.

Sean Higgins is an independent technology writer, former trade publication editor, and outdoors enthusiast. He believes that clear, buzzword-free writing about 3D technologies is a public service.