The definitive guide to SLAM & mobile mapping
The evolution of SLAM
Due to the rapid growth of computing power since the 1980s – not to mention the availability of freely downloadable code from companies like Google – SLAM is now used in a wide variety of applications. In fact, you’ll see it in virtually every application where a machine requires a live 3D map of its surroundings to operate. This development in technology has helped us understand how to implement SLAM across different platforms and environments, enhancing the capabilities of mobile mapping systems.
Here are just a few applications that rely on SLAM technology:
- Autonomous consumer robotics (like drones or vacuum cleaners)
- Self-driving cars
- Smartphone augmented reality apps
- 3D mobile mapping systems
These everyday products utilize simultaneous localization and mapping technology for accurate real-time navigation.


Mobile mapping vs terrestrial laser scanning
Comparing workflows and how they meet your project requirements
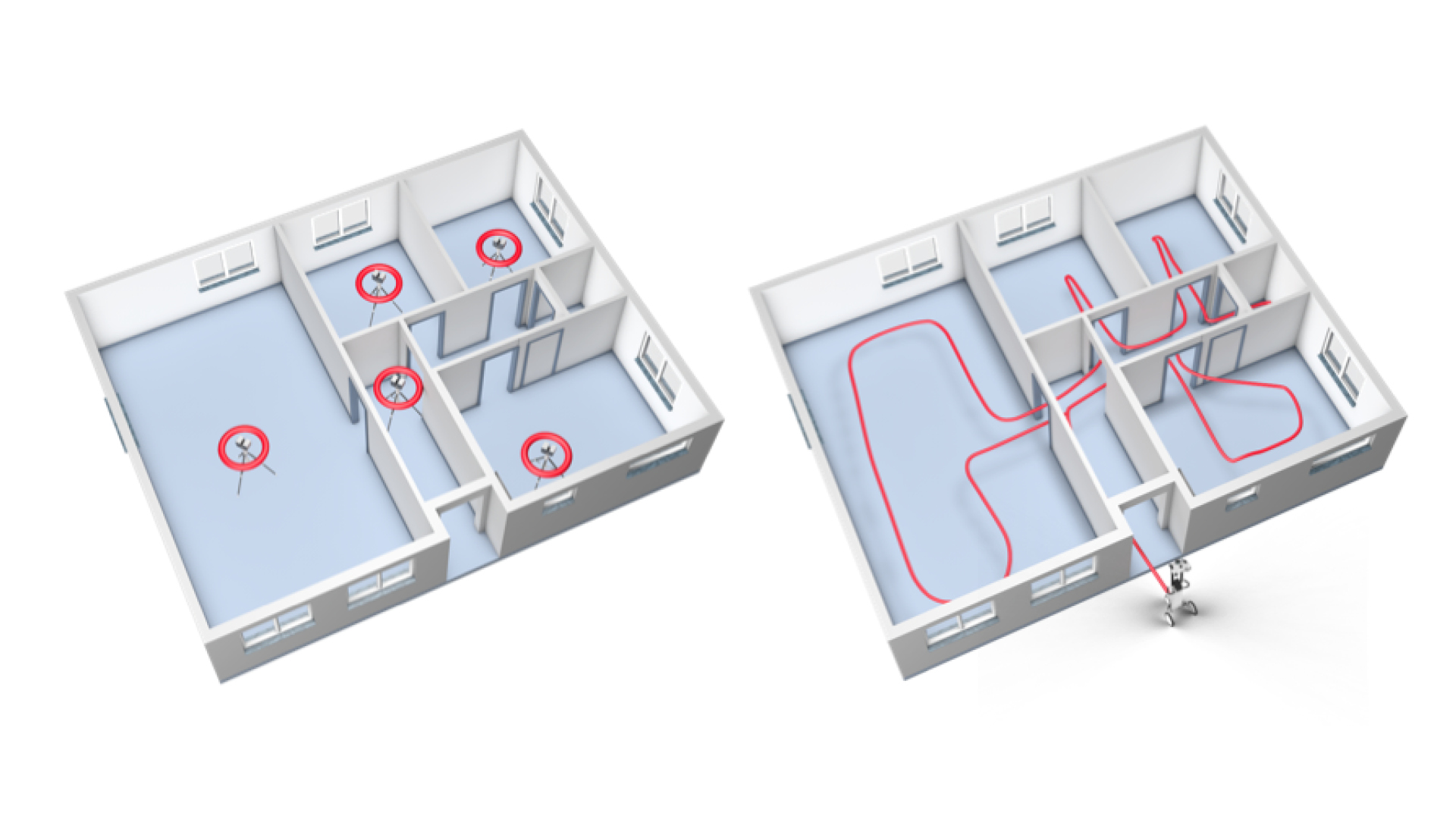
To illustrate the benefits of SLAM and mobile mapping systems, let’s look at how it performs compared to a TLS while documenting a typical office environment.
To the right, you will see an illustration of the setups you'd need to capture this complex space using TLS and target-based registration. Add extra setups in each of the door frames for cloud-to-cloud registration (unless you want to spend the time to set up targets). Add extra setups if there are furnishings obstructing your scanner’s view, and even more setups if you wanted to capture the fine details of features like window frames.
At the fastest, you could scan this space in about 20 minutes with a TLS, but given the extra factors we listed above, you can see how it would likely take more than that.
Using a mobile mapping workflow, you could ditch the tripod, and just walk through the space as necessary to capture. You can move fast and be sure that you’ve gotten everything you need, allowing the simultaneous localization and mapping technology to take care of mapping your surroundings.



Try it yourself
Take the next step in the mobile mapping revolution
The speed and scalability of mobile mapping devices are the best they've ever been, bringing survey-grade accuracy to the most challenging projects. Get hands on with NavVis VLX and see for yourself what's possible. This tool embodies the latest in mobile mapping and simultaneous localization and mapping, offering unparalleled accuracy and efficiency for even the most challenging projects.